To
describe the angular and linear velocity of systems under translational
and rotational motion using the instantaneous center of zero velocity.
The velocity of any point B in a rigid body can be described by
vB=vA+ω×rBA
where ω is the angular velocity, rBA is the relative position vector from point A to point B, and vA is the velocity of point A. Choosing point A to have zero velocity, vA=0, simplifies the equation to
vB=ω×rBA
The point chosen such that the velocity is zero is called the instantaneous center of zero velocity (IC). The IC
lies along the instantaneous axis of zero velocity, which is
perpendicular to the plane of motion. The intersection of the axis and
plane of motion define the location of the IC. Because we chose point A as the IC, the equation becomes
vB=ω×rBIC
Point B revolves around the IC. Because of this circular motion the direction of vB must always be perpendicular to rBIC and vB's magnitude becomes
vB=ωrBIC
Part A
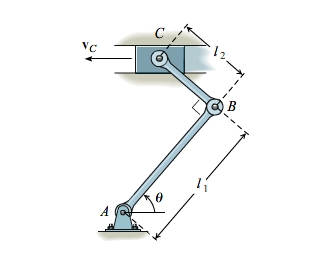
The mechanism shown has lengths l1 = 3.70 ft and l2 = 0.800 ft . (Figure 1) At the instant shown, block C is sliding to the left. The magnitude of the block's velocity is vC = 1.00 ft/s , and θ = 47.0 ∘. For link BC, graphically locate its instantaneous center of zero velocity (IC) by drawing two vectors: one from the IC to point B and one from the IC to point C.
Part B
At the instant shown, determine ωBC, the magnitude of the angular velocity of link BC. Use the same values from Part A: θ = 47.0 ∘, vC = 1.00 ft/s , l1 = 3.70 ft , and l2 = 0.800 ft .
ωBC
=
0.852
rad/s
Part C
At the instant shown, determine ωAB, the magnitude of the angular velocity of link AB.

WHERE İS THE SOLUTİON STEPS?
ReplyDelete